La correzione della linearità si basa sulla funzione del driver stepper Trinamic che permette di definire una forma d'onda di corrente personalizzata. La forma d'onda predefinita di Trinamic è una funzione sinusoidale, ma la forma d'onda reale può essere leggermente diversa e dipende dal tipo di motore passo-passo. Inoltre, motori dello stesso tipo possono avere forme d'onda diverse. La distorsione maggiore si verifica quando l'onda attraversa il punto zero (o intorno ad esso), quindi l'onda sinusoidale originale viene modificata con la funzione power per eliminare questa distorsione.
Procedura di calibrazione per la correzione della linearità
- Vai nel menu LCD della stampante -> Impostazioni -> Correzione Lin.->Correzione E, e disattivala.
- Scarica e stampa il g-code di calibrazione
- Osserverai che sulla torre appariranno alcune linee moiré diagonali. Trova un punto con la superficie migliore sull'oggetto di calibrazione.
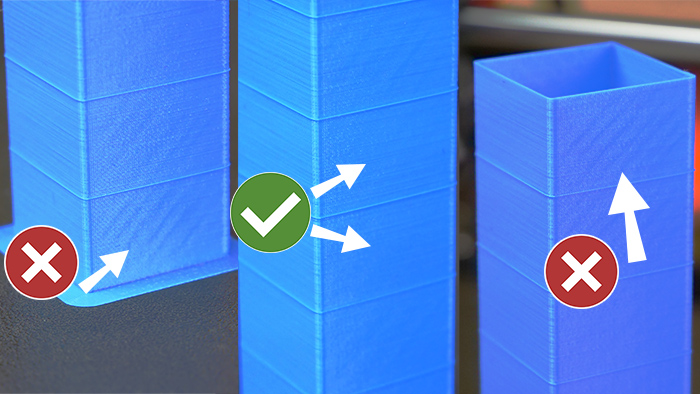
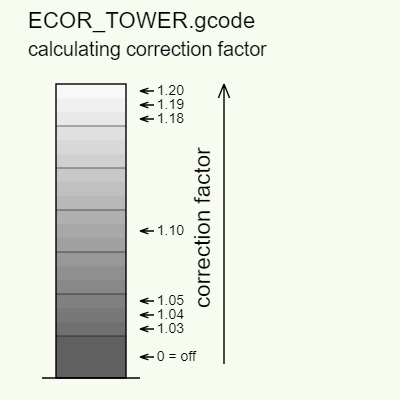
- La maggior parte delle stampanti avrà una distorsione minima intorno al centro verticale dell'oggetto (valore 1,10), ma la tua potrebbe essere diversa. Nota il tuo valore ideale.
- Abilita nuovamente la correzione E nel menu LCD -> Impostazioni -> Correzione Lin.->Correzione E. Regola il valore a quello che ti soddisfa.
Nel firmware 3.13.0 e in quelli più recenti, è stato modificato il sistema di numerazione del menu per il fattore di correzione, che va da 0 a 200.
Di seguito la corrispondenza:
Il fattore di correzione 1.03 è rappresentato come 030 nel menu.
Il fattore di correzione 1.11 è rappresentato come 110 nel menu. - Stampa qualcosa e vedi se le linee diagonali sono ancora presenti. In caso affermativo, torna al fase 3.